How Mako Robotic Arm Assisted Total Hip Replacement works
Your orthopaedic surgeon will arrange for a Computer Tomography (CT) scan, this is a series of X-rays taken at different angles, that can help surgeons see things that they can’t typically see with an X-ray alone.
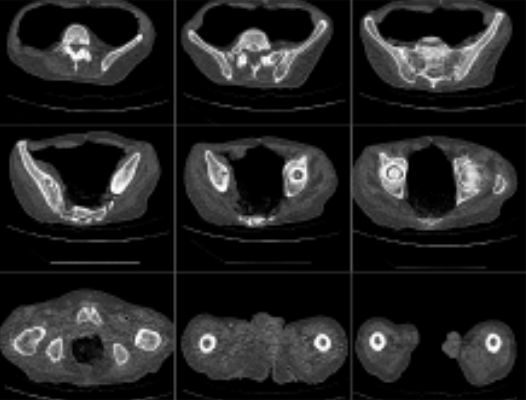
Your orthopaedic surgeon will use the CT scan data to create a 3D virtual model of your unique anatomy, this virtual model is loaded into the Mako system’s software and is used to create a personalised preoperative plan. Before surgery, the surgeon reviews the planned size and placement of the implant, if necessary, the surgeon modifies the preoperative plan. Before surgery, the surgeon reviews the planned size and placement of the implant, if necessary, the surgeon modifies the preoperative plan.

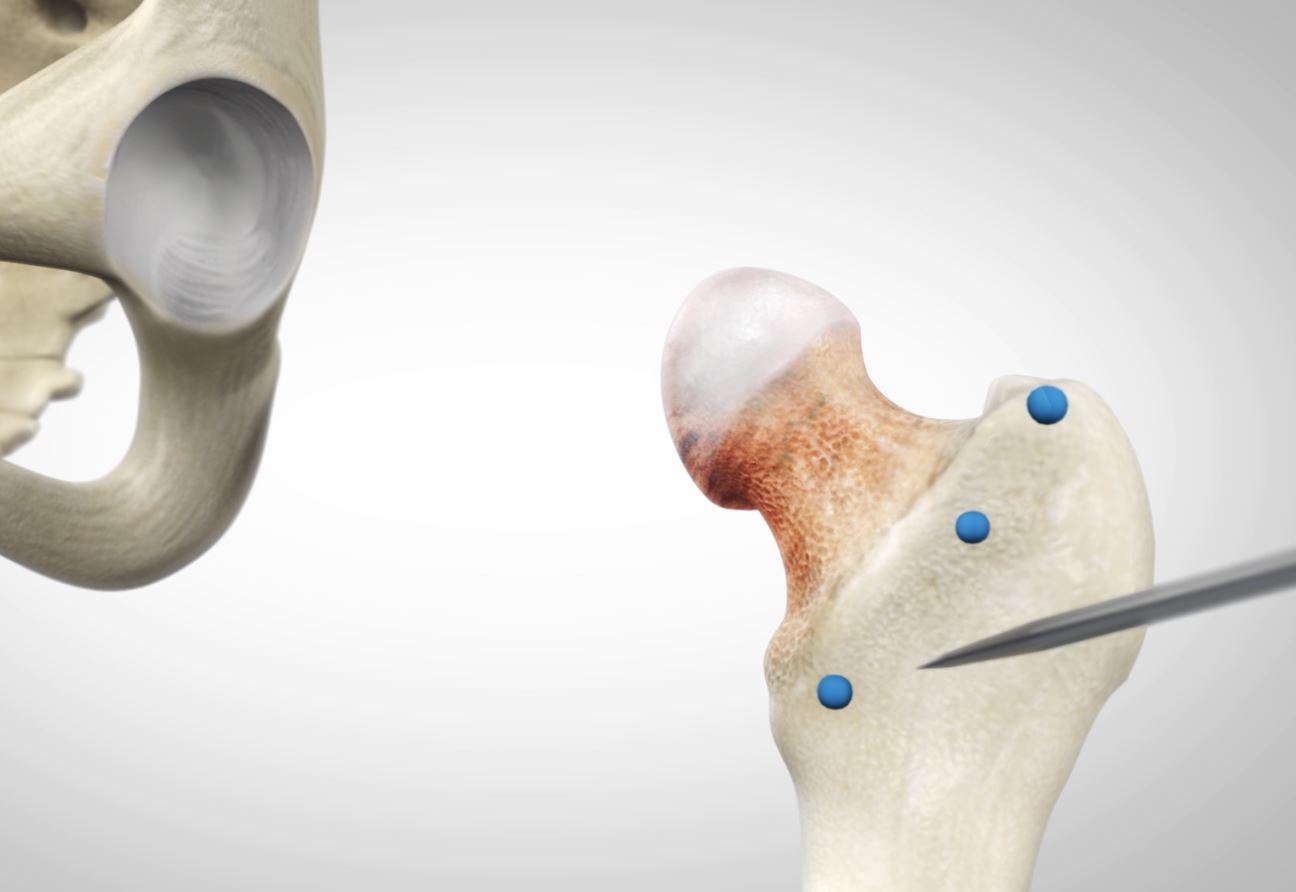
During surgery the surgeon uses a probe to locate points on the hip to register the anatomy in the Mako system. This process establishes the relationship between the patient’s actual anatomy in the operating room and the 3D model that was used during the planning process. This step helps ensure the procedure is executed to plan. Once the anatomy is registered to the 3D model, the surgeon has the flexibility to modify the pre-operative plan during surgery, based on their assessment of the patient’s anatomy.
The surgeon then guides the robotic arm to remove the arthritic bone and cartilage from the hip. Mako’s haptic guided cutting technology creates a “virtual boundary” providing tactile resistance to prevent the surgeon from removing more than just the arthritic bone identified in the preoperative plan. Visual cues, shown on-screen in green, also show how much bone to remove.
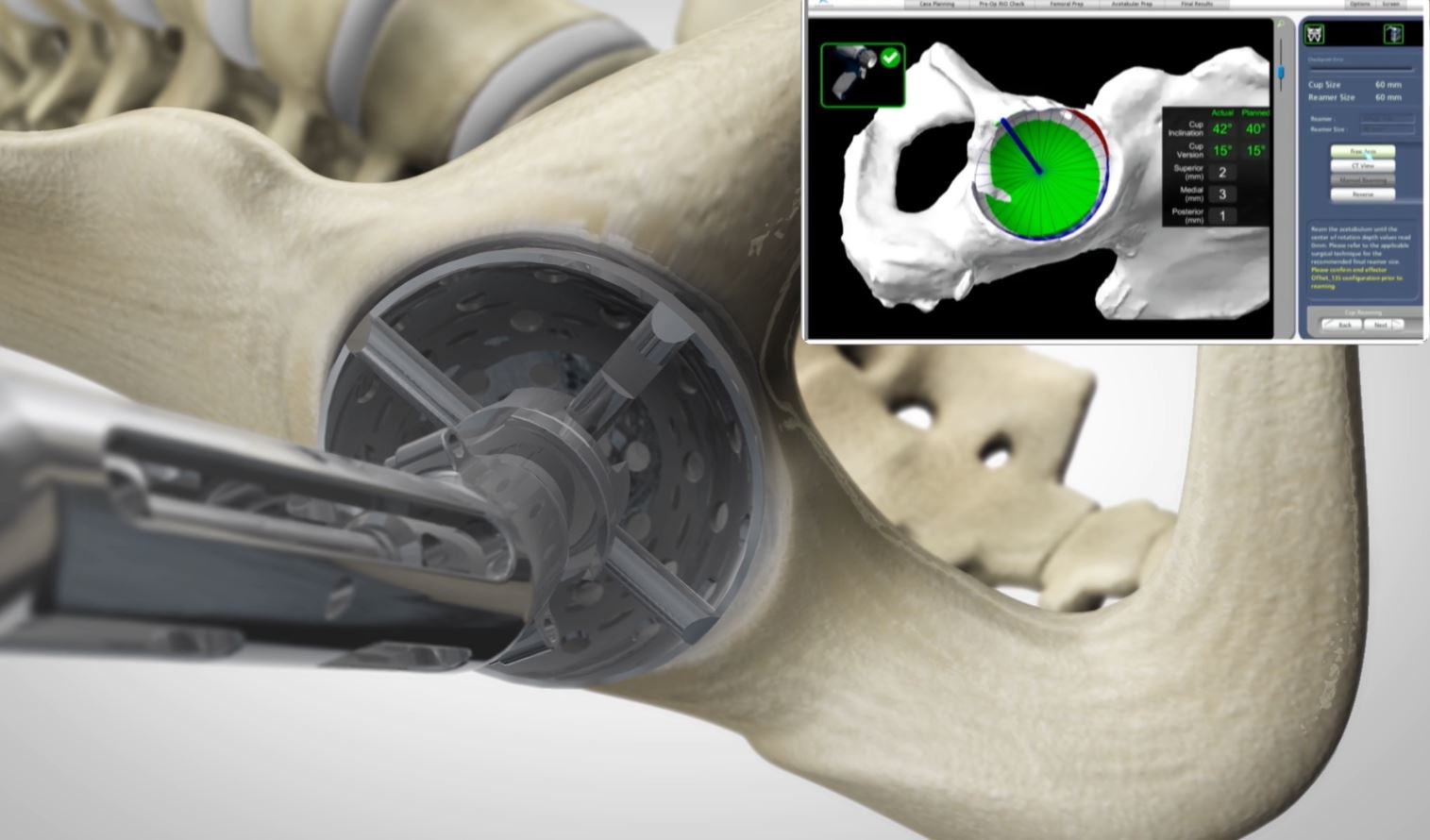
With the diseased bone gone, a total hip implant is inserted into the joint space, and that’s how Mako Total Hip is transforming the way surgeons perform total hip replacement.
For more information on what to expect before, during and after surgery, see preparing for hip surgery.